
 English
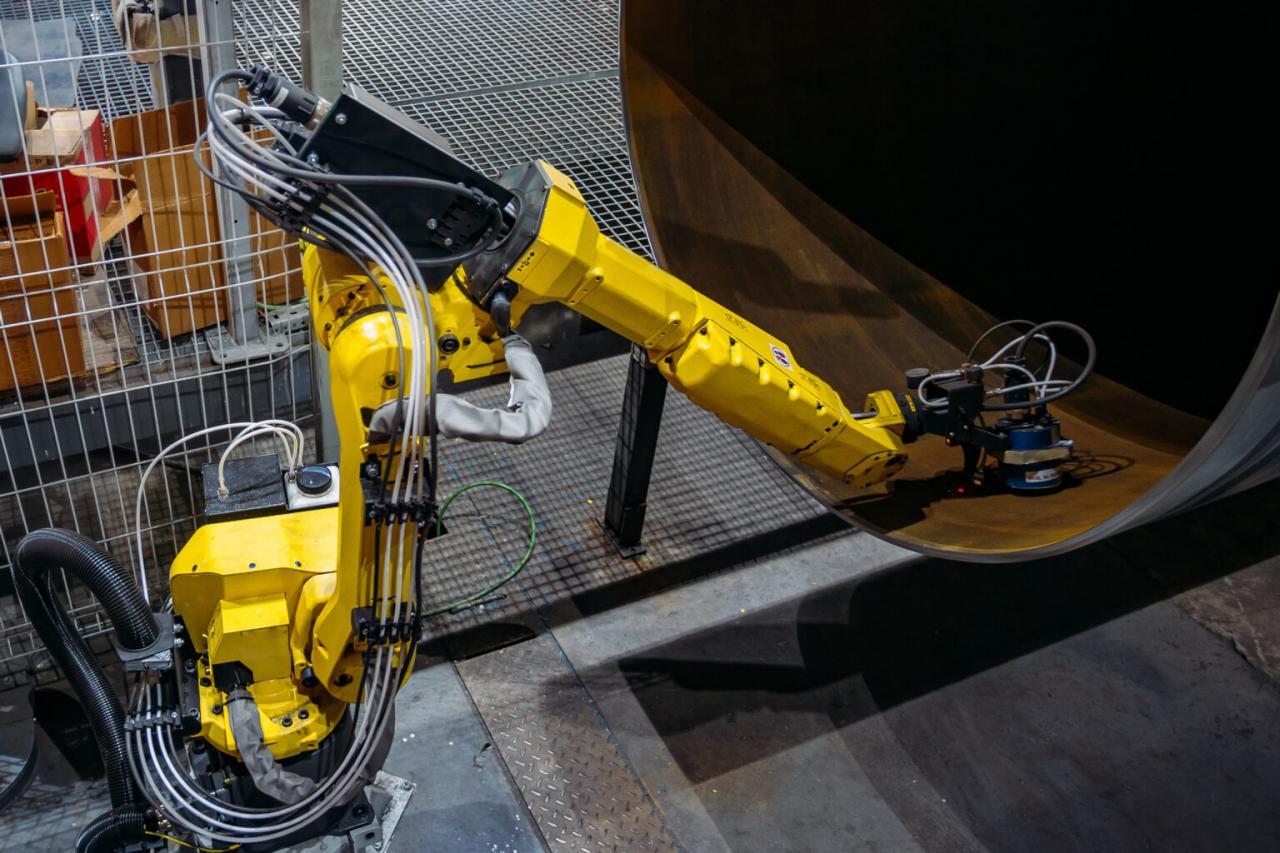
EnglishCách tốt nhất để lập trình Fanuc Robot là gì? Bạn có bất kỳ lựa chọn thực sự nào hay bạn cần sử dụng tùy chọn mặc định do nhà sản xuất cung cấp? Với những chú robot màu vàng sáng đặc biệt của mình, nhà sản xuất Fanuc Robot Nhật Bản là lựa chọn phổ biến cho những người muốn bổ sung khả năng tự động hóa robot vào doanh nghiệp của họ.

Tại sao cách mặc định để lập trình FANUC là hạn chế
Bạn có thể cho rằng bạn được yêu cầu sử dụng phương pháp lập trình mặc định do FANUC cung cấp. Đây là một giả định phổ biến; chắc chắn đúng là nhiều người sử dụng phương pháp mặc định để lập trình robot FANUC của họ. Có 2 phương pháp lập trình mặc định với robot FANUC.
- TP – Đây là ngôn ngữ được FANUC sử dụng để dạy mặt dây chuyền.
- Karel – Đây là ngôn ngữ lập trình có nguồn gốc từ Pascal (như nhiều ngôn ngữ rô bốt công nghiệp khác). Điều này có thể được sử dụng để lập trình robot bằng trình soạn thảo văn bản.
Nếu bạn hoặc ai đó trong nhóm của bạn có kinh nghiệm lập trình Karel hoặc nếu bạn có kinh nghiệm sử dụng FANUC dạy mặt dây chuyền, thì các phương pháp lập trình này có thể là một lựa chọn khả thi cho bạn.
Tuy nhiên, các phương pháp lập trình Fanuc Robot mặc định thường khó sử dụng hơn nhiều so với những gì chúng nên làm. Họ cũng bỏ lỡ chức năng mạnh mẽ đi kèm với các phương pháp lập trình khác. Bạn có thể bỏ lỡ chương trình trực quan và mạnh mẽ hơn nếu bạn chỉ chọn tùy chọn mặc định.
5 Cách Chuyên gia để Lập trình Fanuc Robot
Cách tốt nhất để lập trình rô bốt là sử dụng các kỹ năng hiện có ở mức tối đa. Một điều đó cũng cho phép bạn truy cập tất cả các khả năng mà bạn cần từ robot.
Dưới đây là 5 cách tuyệt vời để bạn có thể lập trình Fanuc Robot của mình; những cách sử dụng tốt nhất các kỹ năng của bạn và khả năng của robot:
1. Với Mặt dây chuyền dạy họcFanuc Robot
Tất nhiên, cách lập trình mặc định của một robot được sử dụng rộng rãi bởi các chuyên gia trong lập trình FANUC. Mặt dây dạy đi kèm với robot sẽ cho phép bạn truy cập vào nhiều khía cạnh của chức năng cốt lõi của nó.
Dạy lập trình mặt dây chuyền bao gồm rất nhiều công việc; nhấn nút, điều hướng menu và di chuyển rô-bốt về vị trí mong muốn bằng mắt (một kỹ thuật được gọi là “chạy bộ”). Tạo một chương trình có kích thước hợp lý và độ phức tạp là một quá trình lâu dài. Đó là một quá trình chăm chỉ tương tự để thực hiện các thay đổi đối với chương trình sau này.
Dạy lập trình mặt dây chuyền có thể trở nên mạnh mẽ trong tay phải. Tuy nhiên, vấn đề chính là nó là một phương pháp lập trình trực tuyến mất nhiều thời gian. Điều này có nghĩa là robot cần phải ngừng hoạt động để lập trình lại nó, điều này làm giảm năng suất của nó.
2. Với lập trình ngoại tuyến dựa trên văn bảnFanuc Robot
Bạn có thể giảm bớt tác động tiêu cực của lập trình trực tuyến bằng cách sử dụng lập trình ngoại tuyến với rô bốt FANUC của mình. Điều này có nghĩa là bạn tạo chương trình trên máy tính. Sau đó, bạn có thể tải nó xuống bộ điều khiển của rô bốt khi quá trình hoàn tất.
Hình thức thô sơ nhất của lập trình ngoại tuyến là viết mã chương trình trong trình soạn thảo văn bản; sử dụng ngôn ngữ lập trình FANUC’s Karel. Tuy nhiên, điều này đòi hỏi bạn phải có nhiều kinh nghiệm lập trình robot FANUC. Nó thiếu bất kỳ cách nào để bạn gỡ lỗi chương trình khi bạn tiếp tục. Kết quả là giai đoạn gỡ lỗi trên robot vật lý sẽ lâu hơn và gây ra sự chậm trễ tương tự như lập trình trực tuyến.
3. Với Lập trình Ngoại tuyến Đồ họa Fanuc Robot
Cách tốt hơn để lập trình robot FANUC của bạn ngoại tuyến là sử dụng phần mềm lập trình ngoại tuyến chuyên dụng. Điều này cho phép bạn tạo và gỡ lỗi chương trình của rô bốt. Bạn có thể thực hiện việc này bằng trình mô phỏng đồ họa trước khi cần đưa rô bốt ra khỏi sản xuất.
Tất nhiên, một số công cụ lập trình ngoại tuyến dễ sử dụng hơn những công cụ khác. Ví dụ, RoboDK là một phần mềm mô phỏng và lập trình ngoại tuyến mà bất kỳ ai cũng có thể sử dụng, ngay cả khi không có kinh nghiệm về robot.
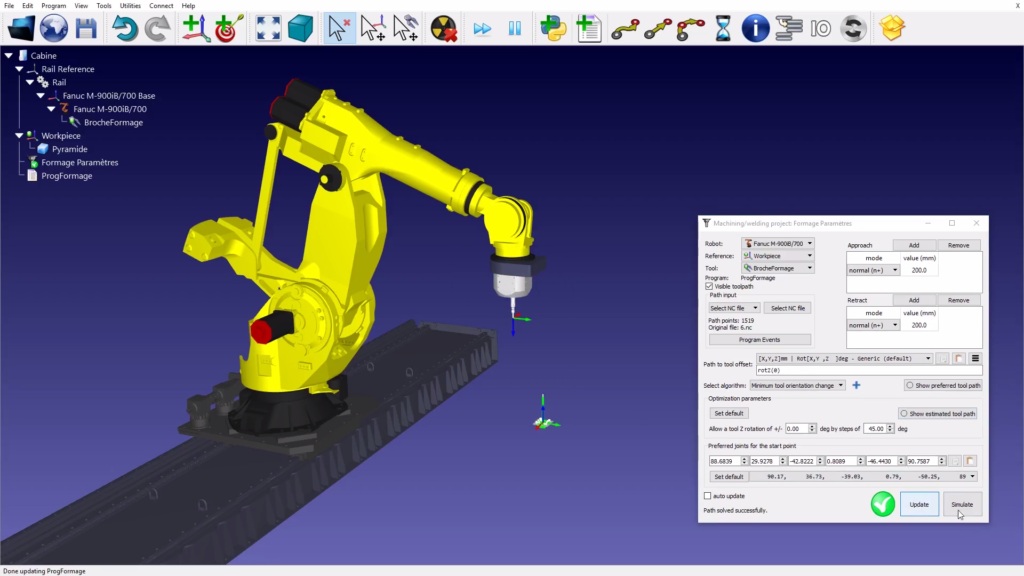
RoboDK cung cấp giao diện đồ họa trực quan và mang lại các khả năng bổ sung cho việc lập trình robot của bạn. Những điều này không có sẵn với các phương pháp thông thường như; trình hướng dẫn gia công chuyên dụng, khả năng in 3D và hơn thế nữa.
4. Với ngôn ngữ lập trình yêu thích của bạn Fanuc Robot
Nếu bạn là một lập trình viên có kinh nghiệm nhưng bạn không có nhiều kinh nghiệm cụ thể với FANUC hoặc rô bốt, bạn có thể tự hỏi liệu bạn có thể lập trình rô bốt bằng ngôn ngữ yêu thích của mình hay không.
Trước đây, điều này sẽ khó khăn vì nó liên quan đến việc tạo các thư viện trình bao bọc và có thể là các thư viện giao tiếp mạng để giao tiếp với bộ điều khiển của rô bốt. Nhưng, bây giờ nó vừa có thể vừa dễ dàng.
Với RoboDK, bạn có thể sử dụng bất kỳ một trong một số ngôn ngữ lập trình cấp cao để lập trình FANUC của mình. Bạn có thể kiểm tra chương trình ngoại tuyến trong trình mô phỏng trước khi tải xuống rô bốt.
5. Với một đầu dò cầm tay
Tất cả bốn phương pháp trước đây đều liên quan đến ít nhất một số hiểu biết về hình học và lập trình robot. Ngay cả với phần mềm đồ họa ngoại tuyến, nơi bạn có thể kéo robot xung quanh trong mô phỏng đồ họa. Bạn vẫn cần phải suy nghĩ về cách môi trường mô phỏng liên quan đến môi trường trong thế giới thực.
Với tất cả những điều đã được nói, có một cách chuyên nghiệp hơn để lập trình robot FANUC thậm chí còn dễ sử dụng hơn tất cả các cách còn lại.
Với RoboDK TwinTrack, bạn có thể tạo chương trình đơn giản bằng cách theo dõi chuyển động mong muốn của robot bằng đầu dò cầm tay. Sau đó, robot sẽ phát lại chuyển động chính xác đó. TwinTrack cũng tương thích với lập trình ngoại tuyến, do đó nó không cần phải ảnh hưởng đến quá trình sản xuất của rô bốt.